


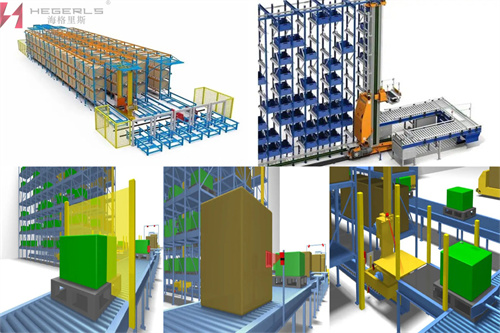
Главните оперативни области на автоматизираниот тродимензионален магацин се областа за прием, област за примање, област за подигање и област за испорака. По приемот на испратницата и стоката од добавувачот, магацинскиот центар ќе ја прифати нововнесената стока преку скенерот за баркодови во делот за прием. Откако ќе се потврди дека испратницата е конзистентна со стоката, стоката ќе биде дополнително обработена. Дел од робата директно се става во просторот за испорака, кој припаѓа на робата преку видот; Другиот дел од робата припаѓа на стока од складиште, која треба да се складира, односно влегува во бербениот простор. Собирањето автоматски го завршува системот за автоматско сортирање и пренесување и автоматскиот систем за водич. По сортирањето, робата влегува во автоматскиот тродимензионален склад. Кога стоката треба да се испорача, според приказот на испратницата, робата ќе биде испратена до соодветната линија за товарење преку автоматската опрема за сортирање и транспорт. Откако ќе се спакува стоката, таа ќе биде натоварена и испорачана. Тогаш, како да ја конфигурирате работата на автоматизираниот тридимензионален склад? Сега ајде да го следиме магацинот на hegerls да видиме!

Општо земено, најчесто користената опрема потребна за прием, складирање и излез се како што следува:
Операција за примање
Стоката ќе се транспортира до одреденото место со железница или пат во контејнери, а контејнерите ќе се истоварат со опрема за работа со контејнери (вклучувајќи контејнерски кран, дигалка од типот гума, подемен кран од шински тип итн.). Општо земено, стоката во контејнерот прво се става на палетата, а потоа робата заедно со палетата се вади со виљушкар за проверка на складиштата.

Работа на складирање
Откако стоката ќе биде прегледана на влезот во складиштето, таа ќе биде поставена на назначената палета според упатствата издадени од системот за складирање на компјутерски менаџмент. Општо земено, виљушкар, носач на палети, транспортер и автоматски воден носач се користат заедно за ставање на стоката на палетата. Транспортерот може да биде транспортер со лента или транспортер со валјак. Генерално, транспортерот и AGV се контролираат со компјутер.
Откако стоката ќе се стави на палетата, положувачот на лента ќе ја стави стоката во назначената решетка во согласност со упатствата за акција, а потоа положувачот ќе се движи надолжно по должината на коловозот. Во исто време, палетата ќе се издигне по колоната на сложувачот. За време на работењето и подигнувањето на сложувачот на патеката, информациите за адресата постојано ќе се враќаат назад до компјутерот. Во исто време, компјутерот ќе испрати различни инструкции до сложувачот на лента за да го контролира процесот на работа на сложувачот на лента, на крајот, ставете ја стоката во одредената позиција на полицата.
Овде, hegerls, исто така, ги потсетува големите претпријатија дека полиците и наложувачите на високо ниво во тродимензионалниот магацин се лесни за реализација на стандардизирани производи; Меѓутоа, влезниот и излезниот транспортен систем треба да биде посебно планиран и дизајниран според распоредот на складиштето, содржината на влезните и излезните операции, бројот на влезни и излезни станици и барањата за пренасочување и спојување. Планирањето и дизајнот на влезниот и излезниот транспортен систем е клучот за применливоста на автоматизираниот тридимензионален склад. Планирањето и дизајнот на влезниот и излезниот транспортен систем се тесно поврзани со вкупните димензии и подструктурата на палетата, методите на утовар и истовар, автоматска контрола и методи за откривање на соодветната логистичка опрема.

Операција за излез
Испораката на стоката и работењето на магацинот се контролирани од истиот контролен систем, а процесот на работа е спротивен.
Во моментов, постојат различни специјални работни машини, како што се дојдовни и излезни транспортери, кои се важен дел од големите и сложени автоматизирани магацини. Тие се поврзани со сложувалки и други машини за да се постигне брз транспорт на стоки. Иако влезните и излезните транспортни системи на секој корисник се различни, тие сепак се составени од различни типови транспортери (синџирски транспортер, транспортер со ролери, композитен транспортер на маса со ролери со синџир, композитен транспортер на маса со ролери со синџир со функција за пренос на валчести маси) и нивните основни модули .
Време на објавување: август-10-2022 година